condynsate.Simulator
Setting up the Simulation Environment
Import necessary condynsate modules
[1]:
from condynsate import Simulator as conSim
from condynsate import __assets__ as assets
Create a instance of condynsate.simulator that does not use the keyboard or the animator but does use the visualizer.
[2]:
simulator = conSim(keyboard = False,
visualization = True,
animation = False)
You can open the visualizer by visiting the following URL:
http://127.0.0.1:7002/static/
Load the pendulum into the simulator. Set fixed = true so that the base link of the pendulum is fixed in space. Set update_vis = true so that its position updates are reflected in the visualizer. Additionally, set the base pitch to 180 degrees and the yaw to 90 degrees so the pendulum is oriented downward and swings in the YZ visual plane, respectively.
[3]:
pendulum = simulator.load_urdf(urdf_path = assets['pendulum'],
fixed = True,
update_vis = True,
yaw = 1.571, # All angle arguments are in radians
pitch = 3.142) # All angle arguments are in radians
Set the "chassis_to_arm" joint friction to some small value. The "chassis_to_arm" joint is the rotational joint about which the pendulum swings
[4]:
simulator.set_joint_damping(urdf_obj = pendulum,
joint_name = 'chassis_to_arm',
damping = 0.05)
Set the initial angle of the pendulum. We denote that this is an initial condition with the initial_cond = True flag and we make the change instantaneously by using the physics = False flag.
[5]:
initial_angle = 0.1745
simulator.set_joint_position(urdf_obj = pendulum,
joint_name = 'chassis_to_arm',
position = initial_angle, # For a rotational joint, this value is in radians
initial_cond = True,
physics = False)
Setting up Data Collection
For fun, we will compare the dynamics of our nonlinear simulation to the small-angle linear approximation of pendulum dynamics. To do so, we define the small-angle pendulum dynamics approximations.
[6]:
# Use a numerical integrator and the linear approximation of pendulum dynamics to get an estimated trajectory
import numpy as np
linear_angle = lambda t : initial_angle * np.cos(np.sqrt(9.81/1.0) * np.array(t))
linear_angle_vel = lambda t : -np.sqrt(9.81/1.0) * initial_angle * np.sin(np.sqrt(9.81/1.0) * np.array(t))
Create an empty dictionary to collect simulation data
[7]:
data = {'angle' : [],
'angle_vel' : [],
'time' : [],}
Running the Simulation
Run the simulation in a loop. Begin by resetting the simulation using condynsate.Simulator.reset, then create a loop. The loop terminates when the flag condynsate.Simulator.is_done flips to True. In each time step of the simulation loop we do three things:
Take a simulation time step.
Extract and store the state of the
"chassis_to_arm"joint. if a successful simulation step is taken. (Successful simulation steps are indicated bycondynsate.Simulator.stephaving aret_codegreater than0.Reset the data dictionary if the simulation was reset during
condynsate.Simulator.step. A simulation reset is indicated bycondynsate.Simulator.stephaving aret_codeequal to0.
By setting the real_time = True flag and max_time = 5.0 in condynsate.Simulator.step, we tell the simulation to attempt to run in real time for 5 seconds.
[8]:
# Reset before running a simulation loop
simulator.reset()
# Get the initial joint state at time t = 0.
state = simulator.get_joint_state(urdf_obj = pendulum,
joint_name = 'chassis_to_arm')
data['time'].append(simulator.time)
data['angle'].append(state['position'])
data['angle_vel'].append(state['velocity'])
# Create the main simulation loop
while(not simulator.is_done):
# Take a single physics step of condynsate.Simulator.dt seconds. This will
# automatically update the physics and the visualizer, and attempts
# to run in real time.
ret_code = simulator.step(real_time = True,
max_time = 5.0)
# Add the simulation data at the current time if a simulation step is taken
if ret_code > 0:
state = simulator.get_joint_state(urdf_obj = pendulum,
joint_name = 'chassis_to_arm')
data['time'].append(simulator.time)
data['angle'].append(state['position'])
data['angle_vel'].append(state['velocity'])
# Handle resetting the data collection if the simulation is reset.
if ret_code == 0:
data = {'angle' : [],
'angle_vel' : [],
'time' : [],}
Post-Processing
Here we format and plot the data we collected during the simulation using the matplotlib package.
[9]:
# Plot simulation data
import matplotlib.pyplot as plt
%matplotlib inline
# Create the plot
fig, axes = plt.subplots(ncols=1, nrows=2, sharex=True, figsize=(10,5))
# Plot the angles
axes[0].plot(data['time'], data['angle'], c='r', lw=2, label='Simulated')
axes[0].plot(data['time'], linear_angle(data['time']), c='b', lw=2, ls="--", label='Small-Angle')
axes[0].set_ylabel("Angle [rad]")
axes[0].legend(bbox_to_anchor=(1.21, 1.05), frameon=False)
# Plot the angluar velocities
axes[1].plot(data['time'], data['angle_vel'], c='r', lw=2, label='Simulated')
axes[1].plot(data['time'], linear_angle_vel(data['time']), c='b', lw=2, ls="--", label='Small-Angle')
axes[1].set_xlabel("Time [s]")
axes[1].set_ylabel("Angular Vel [rad/s]")
fig.suptitle("Small Angle Approximation vs. Simulation")
plt.tight_layout()
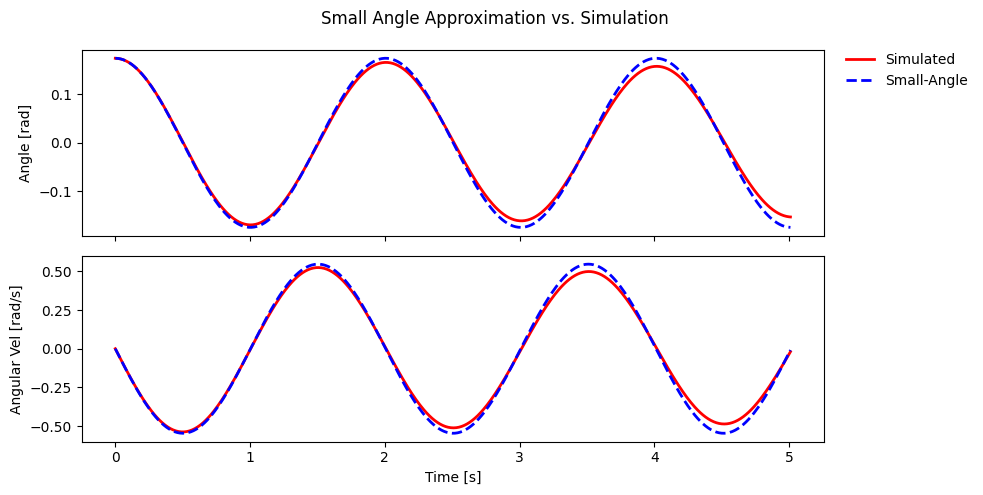
As expected, because the initial angle was small (~10 degrees) the period of the nonlinear simulation and linear approximation are close; however, due to the joint damping the amplitude of the simulation decreases with time. This behavior is not captured by the small-angle approximation.